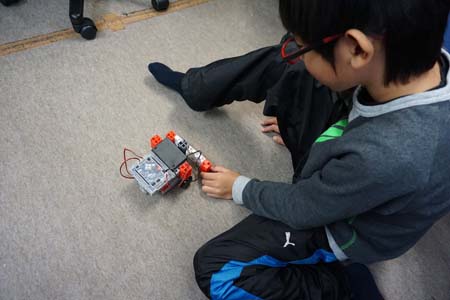
ロボット教室 衝突回避システム
衝突回避自動車とは、動く車型ロボットの目の前に壁を置くとブレーキがかかって止まる、最近の車についている安全機能そのものです。また、それを応用して、壁が目前に迫ると後退&旋回をしながら壁を避ける車に発展させました。
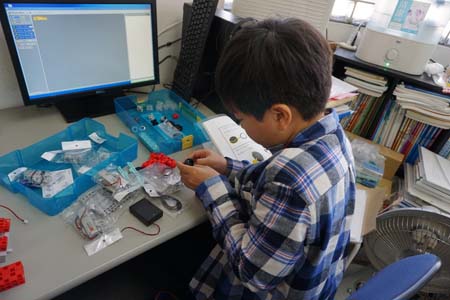
どの子の表情も真剣そのものです。みんな優秀です。目標範囲は全員クリアして、さらにテキストの範囲を超えて、皆が各自の創造力を働かせて個性ある1台に仕上げました。
Hくんは、バックしながら曲がる処理のところで、左右のモーターの速さを逆に入れ替えてみたら、今まで右側にバックしていたのが、左側にバックすることを肌で感じていたり、丁寧に理解していました。今度は、障害物に対して弧(半円)を描いて避けるようなプログラムを作りたいから教えて!とお願いされました。(笑)
小学3年生で最年少のIくんも、曲がりながらバックする時に左右のモーターの速度を入れ替えてみたらどうなるかな???とやってみる前に同様の質問をしてみたら、「今まで右後ろにバックしていたのが左後ろにバックする」と見事な回答が返ってきました。すごい!
ロボットの形を工夫して、目玉をつけて顔を作ったIくん。先生からのクリスマスプレゼントのセンサー接続ケーブルを使って、追加でLEDランプを頭につけて、壁に近づくと光り、壁から離れると消えるように改良したのはT君でした。

そして、Nくんは造形で工夫するのではなく、プログラムで工夫するんだ!ということで、なんと正五角形の形にほぼ近い形を走ることができる車を作りました。これには先生方もびっくりしました。
子供の発想力や適応力はすごいものがあります。どの子も、楽しそうに満足した顔をして、そしてまだやりたそうにしているところを授業終了にして、やり足りなさげに帰っていきます。(笑)
1月以降もロボットプログラミング教室は続きます。まだ、1、2名は空きがあります。ご興味のある方はご連絡下さい。